








A large part of achieving this goal requires us to understand the tradeoff between model-free (data-driven) and model-based methods.
- On one hand, it is feasible to rely entirely on model-free control methods for controlling complex stochastic systems, but a well-known issue with these methods is their intensive data consumption and training time.
- On the other hand, model-based control methods require little to almost no data or training, but can only be designed for simpler classes of stochastic systems, i.e., those whose behavior can be written as explicit equations.
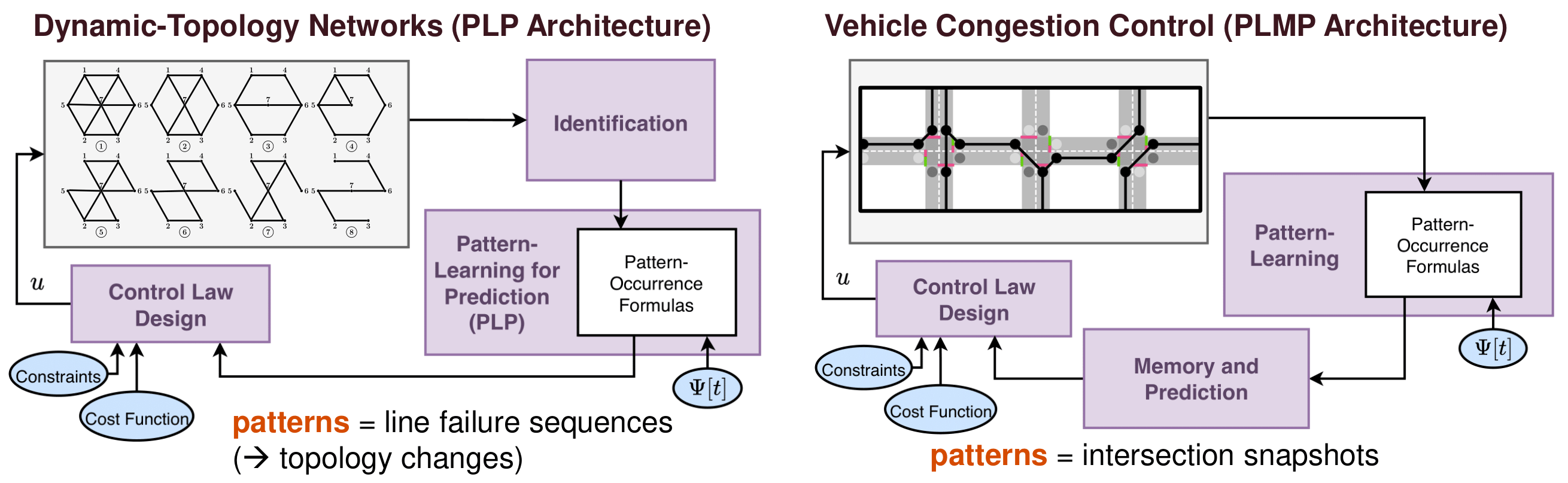
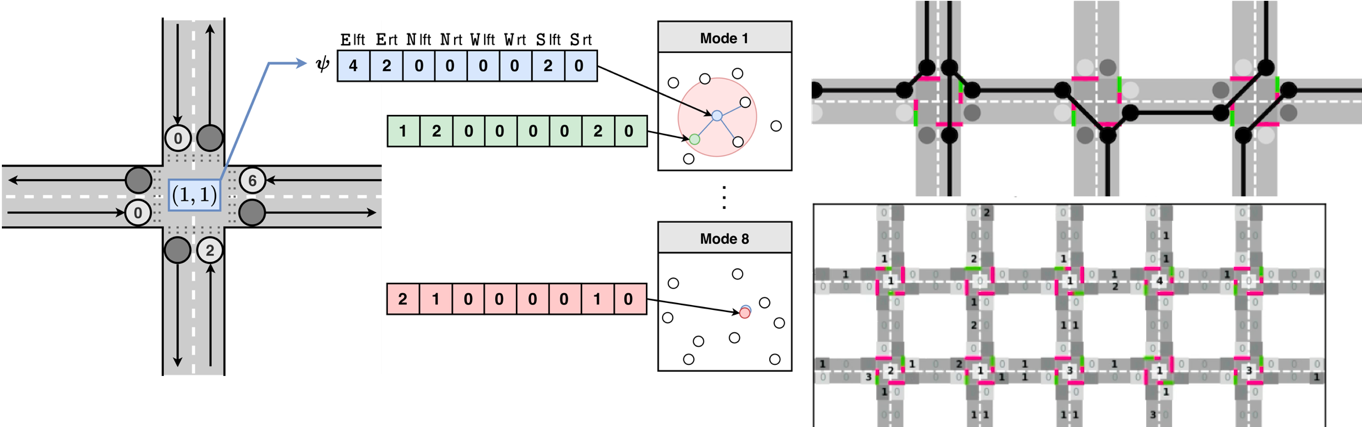
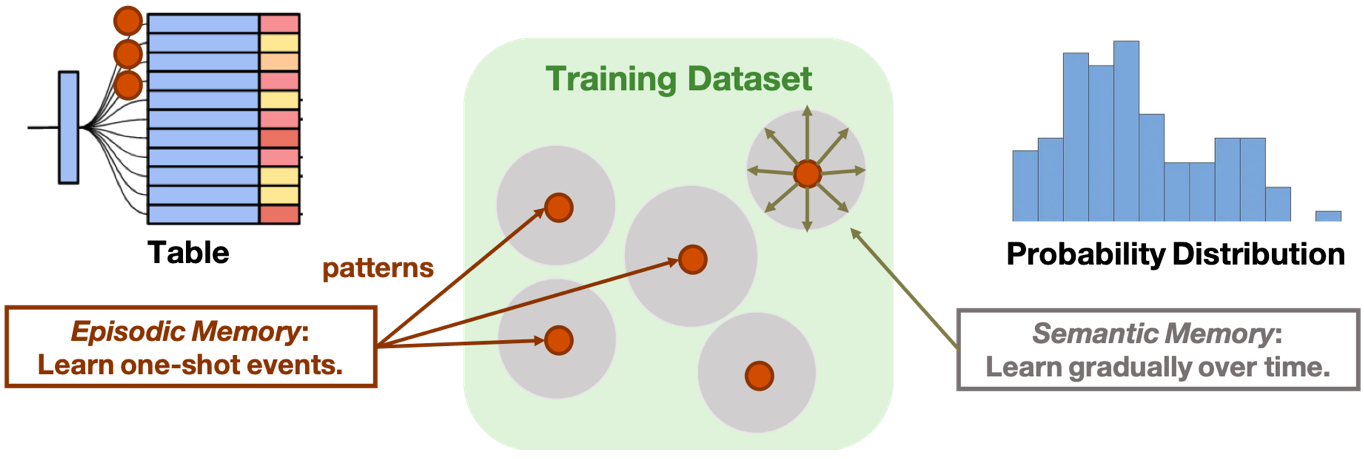
We identify and use patterns to develop autonomous control/estimation algorithms that are more efficient in data consumption and computation time.
Related work(s):
- SooJean Han, Soon-Jo Chung, John C. Doyle, "Predictive Control of Linear Discrete-Time Markovian Jump Systems by Learning Recurrent Patterns." Automatica, 2023.